センターデフがヨーにもたらす影響
それではセンターデフがもたらす挙動について考えてみましょう。
後輪駆動車のLSDが、ある条件下、と言うより街乗りのような普通の条件下では、車体のヨーを戻す働きがあると書きましたね?
実はセンターデフにも同様にヨーを戻す働きがあるのです。
FR車が曲がる時には、駆動輪の左右のタイヤに回転差がでるためLSDが付いているとどちらかのタイヤが滑りましたね。
対してセンターデフが付いている四輪駆動車は、曲がる時に前後のタイヤに回転差が出ますね?
これは教習所で習ったいわゆる”内輪差“によるものです。
交差点などを曲がる時に、前輪よりも後輪のほうが内側を通るので、特に左折では歩行者や自転車を巻き込まないようにと習ったはずです。 図1
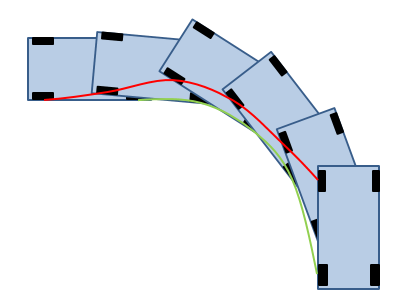
図1 車の内輪差
そしてこの内輪差は、大型トラックやバスのようなホイールベースが長い車では、より大きくなることは経験でわかると思います。 例えば大型トレーラーなんかは交差点を曲がる時に、前輪がめちゃくちゃ大回りをしていますよね?
つまり、、、前輪と後輪の曲がるラインが異なる、具体的に言えば描くRが異なるということは、当然、前輪の方が後輪よりも長い距離を走ることになりますね。
よって、車が曲がる時にはどうしても前輪の方が後輪よりも回転数が高くなるのです。
センターデフが付いていないか回転の制限をしていなければ、これは問題になりません。
ですがセンターデフが前後の回転数を制限すると、当然どちらかのタイヤが滑ることになりますね?
極端な例を上げれば、センターデフが直結、つまり前後の回転差を一切許容しないとすると、直線以外は常に前後どちらか、或いは両方のタイヤが滑っている状態で走ることになるでしょう。
まあセンターデフが直結という車は、ダート道や雪道のような低μ路を走る目的の車以外に使われることはないと思いますが、分かりやすいようにセンターデフが前後輪の回転差を全く許さないセッティングの車を考えてみましょうか。
実は四駆の動きはとても複雑であり、前後の荷重やコーナリング姿勢によってヨーの付き方が異なるのです。
まずはブレーキングやエンジンブレーキ状態での、減速しながら曲がっている状態を考えて見ましょう。
減速中には普通のフロントエンジンの車では、大きな前荷重となりますね?
よって前輪のグリップが支配的になる、つまり前輪のグリップが高いので四輪の回転数は、前輪の回転数に従うことになるでしょう。
センターデフが直結だと全てのタイヤの回転数は同じになりますから(ここでは左右の回転差は無視します。或いは左右のデフも直結だと仮定しましょう)。
となると図2の様に、前輪が本来の回転で回るのに対し、前輪よりも短い距離を走る後輪は、距離に対して過回転になりますね? つまり、ホイールスピン加速状態と同じです。
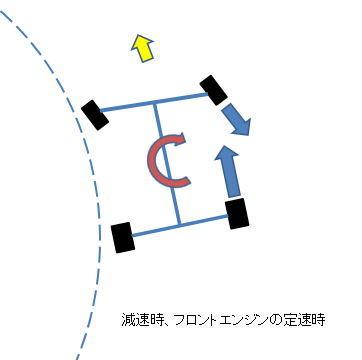
図2 減速時はヨーを戻す
そうなるとFRのLSDの話に書いたのと同じく、後輪は路面から強い制動力を受けることになります。
後輪がブレーキローターで、路面がブレーキパッドみたいなものですからね。
今回はアクセルを踏んでいないので駆動力がかかっていませんから、後輪に掛かる強い制動力は当然、前輪にも伝わって前輪に強い制動力が掛かることになりますね。
ちなみにこのブレーキ症状には、“タイトコーナーブレーキング現象“というちゃんとした名前が付いているんです。
すると舵角が切れていれば、図2の様に前輪には右斜め後ろ方向に引く力がかかり、後輪はまっすぐ前に押す力が掛かることになります。
この2つのベクトルの力がヨー軸の周りに働けば、ヨーを戻す方向の力になりますね?
つまり、センターデフがロックしていると減速時にヨーを戻す力が掛かってしまうことになります。
では次に加速時のケースを考えてみましょう。
加速時には減速時と比べて後輪の荷重が増えますね? まあ加速度にもよりますが、フロントエンジンの車でも低速域からの大きな加速時や上り坂を加速する時には、荷重移動により前輪よりも後輪のグリップの方が上がるでしょう。
ならば今度は、後輪の回転数が四輪の回転数になることになります。 すると今度は長距離を走る前輪の回転数が足りません。 つまり前輪はブレーキロック状態(正確にはハーフロック)と同じですね。
つまり今回もまた、前輪は右斜め後ろに引っ張る力がかかり、後輪は前に押す力が掛かることになります。図3
よってこれまた、ヨーを戻す方向の力になるわけです。
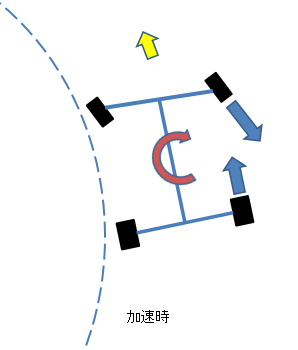
図3 加速時にもヨーを戻す
四駆が曲がらない特性になるのは、この現象によるものが大きいのではないか?と私は考えています。
もちろんこの話はヨーの話だけで、そもそも前後どちらかのタイヤが滑っていれば摩擦円の理論より、横グリップは激減してしまうことになります。
それも四駆が曲がらない、つまりこちらはヨーの話でなく限界域で遠心力に対抗する力が小さくなる理由でしょう。
また加速時のようにフロントタイヤが滑ればそもそもスリップアングルによるCPが大幅に減るので、よりヨーが作りにくくなりますね。
と言った具合に、
センターデフが前後の回転数を許容しないととても曲がりにくい特性の車になる
のです。ですがこれは逆に言うなら、直進安定性はとても高くなりますね?
不意にヨーが発生しても車の方で勝手に戻してくれるのですから、正に自動スピン防止装置です。
よって、これならばスピンやオーバーステア挙動にはなりにくいでしょう。
だから直結のセンターデフはウェット路面をはじめ、グラベルやスノーロードの様な低μ路で使いたくなるわけですね。
さて、今回の話はセンターデフが直結という極端なケースの話でしたが、直結ではなくてもセンターデフが回転数を制限している四輪駆動車というのは、基本的にこの現象、いわゆる“タイトコーナーブレーキング現象“による曲がりにくい特性を持っているのです。
なので四輪駆動車の進化というのは、いかに曲がりやすくするかの進化であったと言っても過言ではないでしょう。
元々直進安定性やトラクションは直結のデフが抜群なのですから、追求するべきは曲がりやすさとの両立なのです。
では次回は、自動車メーカーが四輪駆動車をどの様に曲がりやすくしてきたのか、その方法と歴史について書いていきましょう。
続く……