現実世界の最適解。小Rイン・大Rアウト走法
さて、少し(?)間が空いてしまいましたが、「運転を物理する」の中でも特に重要なテーマに入ります。 本項を読む前に、距離損とスピード損、スローイン・ファストアウトは速いのか、サイン波と矩形波シリーズを読んでおいてくださいね。
今までに書いたコーナーの走り方をまとめると、アウト・イン・アウトでスローイン・ファストアウト走法が最も速く、出来れば旋回中には加減速をせずに、最大の横Gを発生できる状態を長く維持するのが最適解である、ということでしょうか。
また、サイン波運転のようなブレーキをコーナーに入っても長く残す運転は最適解からは遠いと書きました。
しかしながら矩形波運転は理論上は最も速くなりますが、操作がピンポイント過ぎるために難しいと書きましたね。
最適解へのアプローチ(序論)より、コーナーのRとタイヤの摩擦係数μが決まると最大のコーナリング速度が決まり、よってコーナーへの最大進入スピードも一意的に決まりまることになりました。つまり遠心力とタイヤの摩擦力が吊り合うような速度です。
でも理論上はそうですが、実際のコースを走ると中々そんなに上手く行くものではありませんよね……。
例えば理論上100Km/hの最大速度で曲がれるコーナーならば、コーナーリング開始ポイントできっちり100Km/hに減速する必要がありますし、その時にコーナーの終了ポイントまでハンドルを動かさなくていいような、最適なヨーを立ち上げる必要も有ります。
もしも何らかのミスで少しでもオーバースピードで入ってしまったり、あるいは正しいヨーを作る事が出来なければ、ラインを外したりコースアウトしたり、最悪クラッシュすることになりますから。
100Km/hが理論的な限界なのですから、それを少しでも超えれば車の挙動は破綻してしまうわけです。でも1Km/hの誤差もなく毎回ピッタリと100Km/hでコーナーに侵入できる人間なんて居ませんよね??
仮に操作が完璧であっても、ブレーキパッドのμやタイヤのグリップは熱などによって毎回少しずつ変わりますからねっ。よって毎回きっちり100Km/hでコーナーに侵入することは現実的ではありません。
そこでマージンを残すために、100Km/hよりも少し遅い進入スピードでコーナーに入って、できるだけ速く曲って脱出する。
これがスローイン・ファストアウト走法の基本だと思います。
たとえ矩形波運転が最適値であったとしても、現実の世界では多かれ少なかれこのように旋回区間で速度のコントロールをすることになるわけです。もっと正確に言うなら、侵入で落としすぎた速度を旋回区間で加速してやるわけですね。
これは減らすことは出来ても無くすことは出来ないマージンであり、現実の世界の宿命です。(某漫画のシンジ君は無くすことが出来ているようですが)
またサーキットと違いラリーのような先の予測がつきにくいコースでは、より一層このマージンのさばき方が重要となるはずです。
今回書くことは、この旋回区間での加速についての最適解です。
100Km/hよりも遅くても、ある速度でコーナーに侵入した時の最適解は何も変わりません。常に車にμ[G]の加速度を与えて、出口までを出来るだけ短い距離で走ることです。
ここで言う加速度とは、当然、加減速Gと横Gの両方を合わせたものです。
最適解へのアプローチ(序論) に書いた通り、定速でコーナーを曲がる時の最大の速度は、
v=√μgr
でした。
つまり、限界速度はタイヤの摩擦係数μ
とコーナーのR(上式のr)だけで決まるわけでしたね。
しかしながらここで曲がりながら加速するとなると、色々と違ったことが起きます。まず速度が増せば遠心力が増えますね?
つまり上の式より、速度vが増えればそれと釣り合うRも大きくなります。
そして更に厄介なことに、摩擦円の理論より、加速するとタイヤの縦グリップを使ってしまいましたね?その結果、横グリップは本来のものよりも小さくなるわけです。
遠心力増加と横グリップの減少。この両方の作用から、車が走るラインは膨らむ、正確に言うとRが大きくなるわけです。
ということは、マージンを取って少し低めの速度で侵入して、そこから旋回加速を行う時のラインはどうなるでしょうか?
当然、徐々に車が通るRが大きくなるはずですね。多くの人は感覚的にそれを理解しているでしょう。また今までにこのHPの他の項を読んでいる人であれば、おそらく理論的に気づいている人も多いと思います。ですがそのラインをしっかりとイメージしていますか?といわれると、意外と微妙だと思います。
ではここで、私が作ったわかりやすいイメージの図をちょっと載せてみましょう。
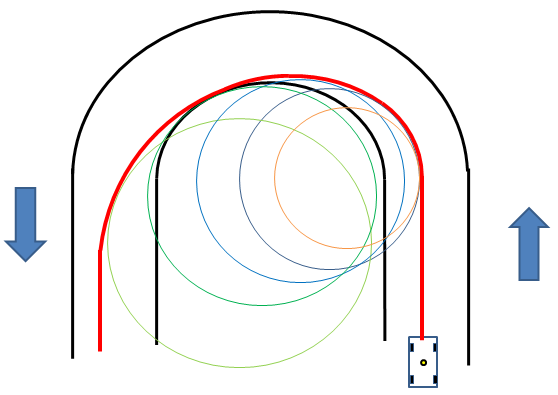
図1 小Rイン・大Rアウトライン
わかりやすいように少し極端な図になっていますが、コーナーの後半に行くに従い、旋回半径が徐々に大きくなるようなラインを取る走り方。
これが、小Rイン・大Rアウト走法です。
現実の世界ではマージンを取ってコーナーに入らざるをえない限り、多かれ少なかれ車はこのようなラインを通ることになります。
立ち上がり重視ラインとかV字ラインと言われるものも、実際には図の様になっているはずです。ならばこの表現の方がわかり易くありません?
ちなみに私は、全てのコーナーをこの図のようにイメージして走っています。この図をイメージして走ると、ラインの組み立ても走り方も変わってくるはずです。おそらく多くの人の場合には、ある程度走り方を変える必要がありますが、この走り方が出来るようになればビックリするくらい速く、そして走りやすくなるはずです。(今回は細かい話には触れないでおきますね)
これは現実世界での最適解ですが、もちろん、目指すべきところは矩形波運転です。
小Rイン・大Rアウト走法は、やはり不必要な減速分のロスと、それを取り返すためのロスが存在しますからね。
よってこの走り方はロスを最小限に抑えるものであって、矩形波運転よりも速くなることはないでしょう。
出来る限り理論的な限界旋回速度に近づけてコーナーに侵入した方が、旋回中の加速Gが無い分、タイヤの横グリップが大きくなって限界旋回速度が上がりますから、やはり目指すのはこっちでしょう。
ですが小Rイン・大Rアウト走法は、オーバースピードで入って修正舵を当てたりラインを外すよりは、おそらく速いはずです。
これらの理由より、現実世界で最も速く走るためには小Rイン・大Rアウト走法から少しずつロスを減らし、矩形波運転に近づけて行くのが一番良いでしょう。つまり前半のRと後半のRの差を、徐々に小さくしていくわけです。
そのようにイメージして走れば、オーバースピードで失敗する確率を減らしつつ、かなり最適解に近い所まで行けるはずです。
ちなみに
初心者の中には図1のコーナーを左から入るような、大Rイン・小Rアウトをする人をしばしば見かけます。当然それは絶対にスローイン・ファストアウトが出来ない、非常に効率の悪い走り方になりますね?
そんな方は是非とも図1をイメージして走ってみてください。イメージって、とても大事なものなんです。
最後にこれは推測ですが、ブレーキを残すサイン波運転をする人は、荷重曲げとこの走法が出来ないからではないか?と私は考えています。以前にも書きましたが、ブレーキを残す運転は欧州のプロドライバーは基本的にやらないそうです(矩形波運転が基本)。
何だかこの辺りに日本と欧州のドライバーの差があるような気がしますねっ。
図1はシンプルな図ですが、この中には色々なヒントが入っています。是非これを見ながらブレーキングポイント、ブレーキリリースポイント、アクセルオンポイント、ハンドルを切るポイント、そしてクリップや脱出ポイントなど、色々考えてみてくださいね。
具体的な操作などの実践編は、いつかまた書く予定です(笑)。 それまでに是非、自分の答えを見つけてみてください。